







توسعه الگوریتمی برای پرواز امنتر پهپادها
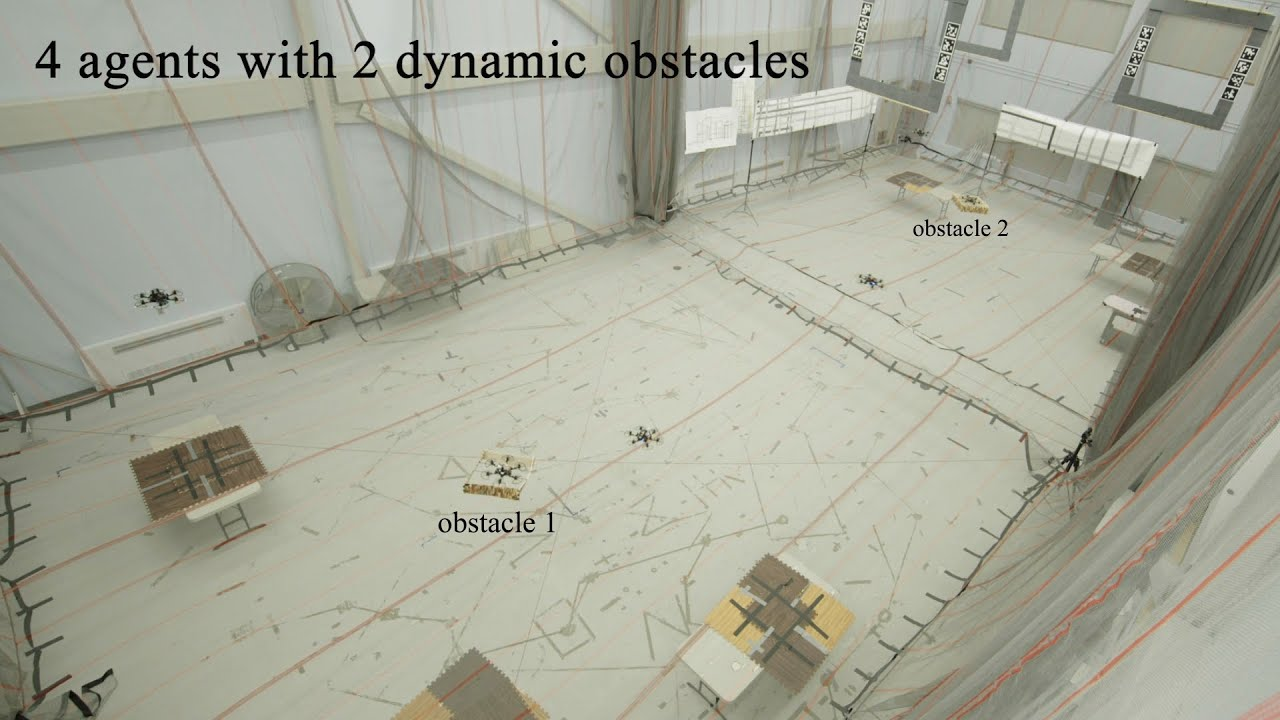
به گزارش شبکه خبری ICTPRESS،وقتی چند پهپاد در حال پرواز در یک محیط بسته هوایی مانند محیط یک گلخانه برای پاشیدن آفتکشها هستند، همواره خطر برخورد آنها به یکدیگر وجود دارد.
محققان موسسه فناوری ماساچوست آمریکا، برای جلوگیری از برخورد احتمالی و پرهزینه پهپادها سیستمی به نام مادر (MADER) در سال ۲۰۲۰ ارائه کردند که این سامانه چندعاملی مسیر حرکت چندین پهپاد را قادر میساخت تا به شکل بهینه و بدونبرخورد مسیرها را بیابند و طی کنند. هرسیستم عاملی مسیر مشخصی را به پهپادهای تحت نظر خود نشان میدهد، سیستمهای عامل هر کدام مسیرهای یکدیگر را در نظر میگرفتند تا پهپادها بهم برخورد نکنند.
اما وقتی این گروه از محققان سیستم یادشده را روی پهپادهای واقعی آزمودند، پی بردند اگر یک پهپاد اطلاعات لحظهبهلحظه از مسیرهای پهپادهای دیگر نداشته باشد، ممکن است مسیری را انتخاب کند که در نهایت به برخورد آنها منجر میشود. محققان سیستم را بازنویسی کردند و اکنون نسخهای تقویتشده از آن ارائه دادند که همان قابلیتهای سیستم چندعاملی قبلی را دارد و حتی وقتی ارتباط بین سیستم عاملهای چند پهپاد تاخیر داشته باشد برخورد بین آنها رخ نمیدهد.
کوتا کوندو، دانشجوی مقطع تحصیلات تکمیلی هوافضا در موسسه فناوری ماساچوست در این مورد میگوید: سیستم مادر به شکلی عالی در شبیهسازی عمل کرد، اما در فضای واقعی سختافزاری آزموده نشده بود. بنابراین ما تعدادی پهپاد ساختیم و آنها را به پرواز دراوردیم. پهپادها باید برای تسهیم اطلاعات مسیرها با هم ارتباط داشته باشند اما وقتی پرواز آغاز میشود، به سرعت متوجه شدیم ارتباطات بین پهپادها تاخیر دارد و همین امر سبب شکست کل سیستم میشود.
الگوریتم توسعه داده شده توسط کوندو و همکارانش یک مرحله را به نام کنترل زمان تاخیر اضافه و با بقیه بخشهای سیستم ترکیب کردند. پهپاد در این زمان به اندازه مشخصی و پیش از اینکه مسیر جدیدی را بپیماید تاخیر میکند. اگر پهپاد اطلاعات مسیری اضافی را از پهپادهای دیگر دریافت کند، مسیر جدید خود را تغییر داده یا ترک کرده و فرایند بهینهسازی را دوباره آغاز میکند.
آزمایش این سیستم جدید توسط کوندو و همکارانش هم به شکل واقعی و هم شبیهسازی، ۱۰۰ درصد در تولید مسیرهای بدونبرخورد بین پهپادها موفق بود. با اینکه حرکت پهپادها کُندتر بود، هیچ سیستم عامل دیگری نمیتواند حرکت پهپادها را بدون برخورد پیش ببرد.
کوندو الگوریتم و مقاله علمی برای ارائه آن را با گروهی از محققان و دانشجویان مقطع پسادکتری موسسه فناوری ماساچوست نوشته و قرار است در همایش بینالمللی رباتها و اتوماسیون ۲۹ مه تا ۲ ژوئن (۸ تا ۱۲ خرداد) به شکل رسمی ارائه شود.
















نظرات : 0