




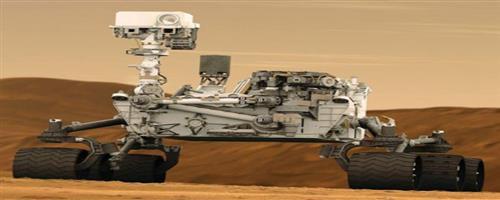
بازوی رباتیک مریخ نورد کنجکاوی بازیابی می شود
به گزارش ICTPRESS، در تاریخ هشتم اسفند، نوسان در جریان برق موجب واکنش حفاظتی اشتباه کنجکاوی شد و این موضوع عملیات آن را در نهصد و یازدهمین روز مأموریت بر سطح مریخ متوقف کرد. از آن زمان تاکنون، تیم مهندسی کنجکاوی از حرکتدادن بازوی رباتیک آن اجتناب کرده و مشغول انجام آزمایشهای تشخیصی هستند.
اتصال مدار زمانی رخ داد که کنجکاوی در حال انتقال نمونه پودر از شیارهای مته به درون محفظه غربالگری بود، گرچه مدت این اتصالی کمتر از یک صدم ثانیه بود، اما موجب بروز خطا در مکانیسمهای حفاظتی کاوشگر شد.
با وجود بروز این نقص، مشاهدات علمی با ابزارهای موجود روی دکل کنجکاوی و همچنین نظارت محیطی توسط ایستگاه هواشناسی ادامه دارد.
دانشمندان، محتملترین دلیل اتصال مدار را در مکانیسمهای ضربهای مته اعلام کردند. پس از تحلیل بیشتر برای تایید این مسئله، تیم علمی قادر خواهد بود در عملیات حفاری و استفاده از مته کنجکاوی، سازگاریهایی اعمال کند.
مته نمونهگیری موجود روی بازوی رباتیک کنجکاوی، از عمل چرخش، چکشزنی یا ضربهزدن برای نفوذ به درون نمونه سنگها و جمعآوری نمونه به منظور تحویلدادن به ابزار تحلیلکننده کاوشگر استفاده میکند.
اتصال مدار زمانی رخ داد که کنجکاوی در حال انتقال نمونه پودر از شیارهای مته به درون محفظه غربالگری بود، گرچه مدت این اتصالی کمتر از یک صدم ثانیه بود، اما موجب بروز خطا در مکانیسمهای حفاظتی کاوشگر شد.
با وجود بروز این نقص، مشاهدات علمی با ابزارهای موجود روی دکل کنجکاوی و همچنین نظارت محیطی توسط ایستگاه هواشناسی ادامه دارد.
دانشمندان، محتملترین دلیل اتصال مدار را در مکانیسمهای ضربهای مته اعلام کردند. پس از تحلیل بیشتر برای تایید این مسئله، تیم علمی قادر خواهد بود در عملیات حفاری و استفاده از مته کنجکاوی، سازگاریهایی اعمال کند.
مته نمونهگیری موجود روی بازوی رباتیک کنجکاوی، از عمل چرخش، چکشزنی یا ضربهزدن برای نفوذ به درون نمونه سنگها و جمعآوری نمونه به منظور تحویلدادن به ابزار تحلیلکننده کاوشگر استفاده میکند.


















نظرات : 0